Procedural Modeling of Cities
Press space to continue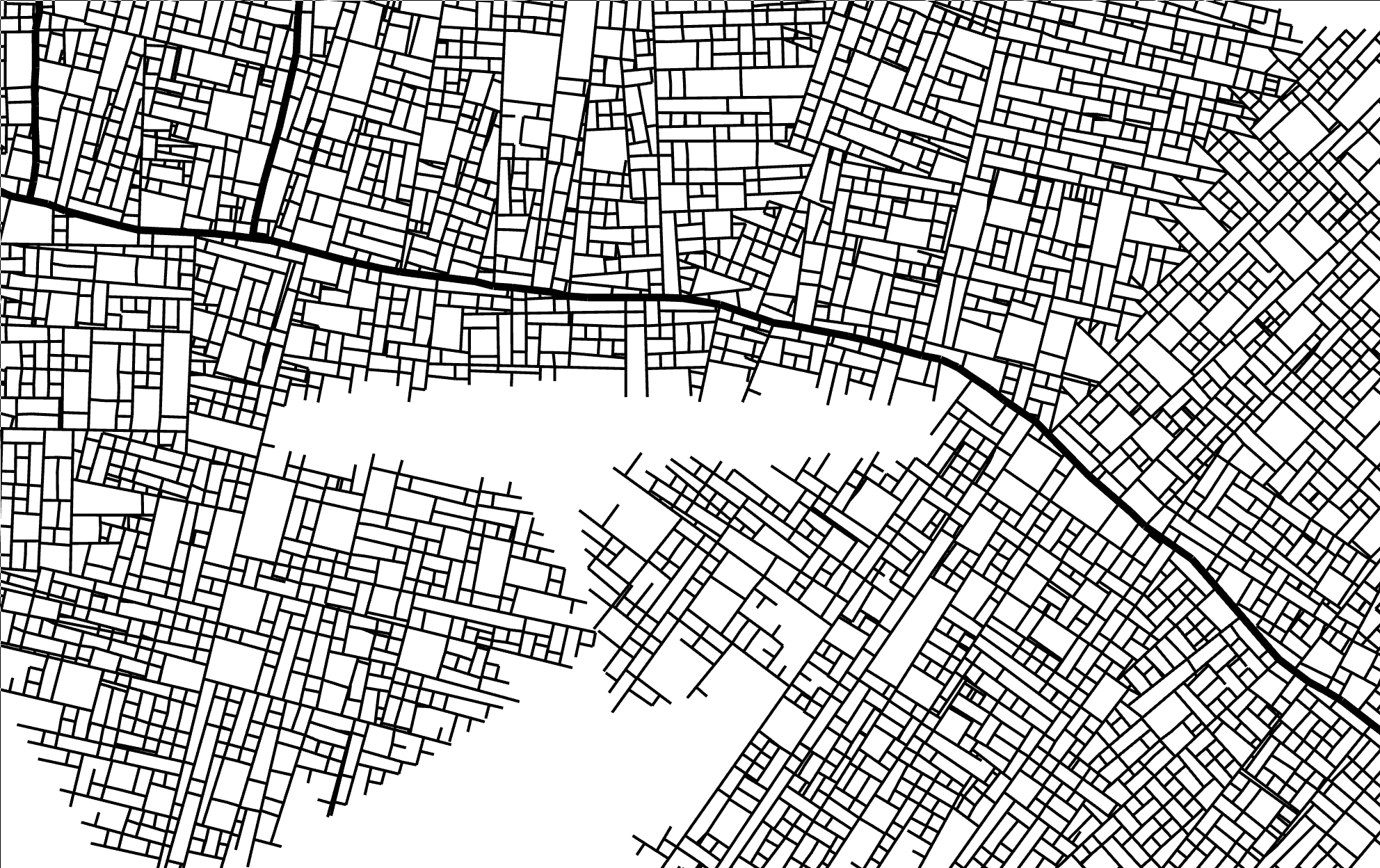
Conflict resolution
If a new segment
- is near an existing street: Adjust endpoint and create intersection
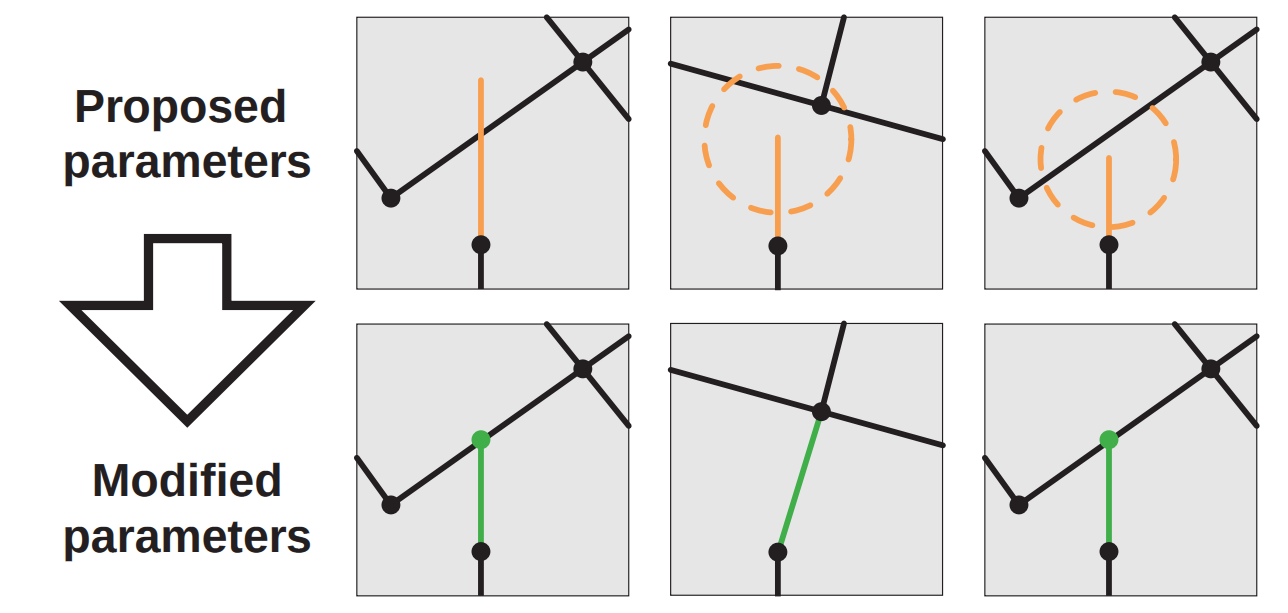
- ends in an obstacle (e.g. water, park): Shorten or rotate segment to fit
Global goals (1)
Simplex noise
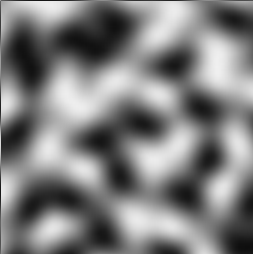
Population map (generated with layered simplex noise):
function populationAt(x, y) {
value1 = simplex2(x / 10, y / 10) / 2 + 0.5;
value2 = simplex2(x / 20 + 0.5, y / 20 + 0.5) / 2 + 0.5;
value3 = simplex2(x / 20 + 1.0, y / 20 + 1.0) / 2 + 0.5;
return Math.pow((value1 * value2 + value3) / 2, 2);
}Global goals (2)
Highways try to connect population centers.
Possible new directions are sampled, the one with largest population is chosen

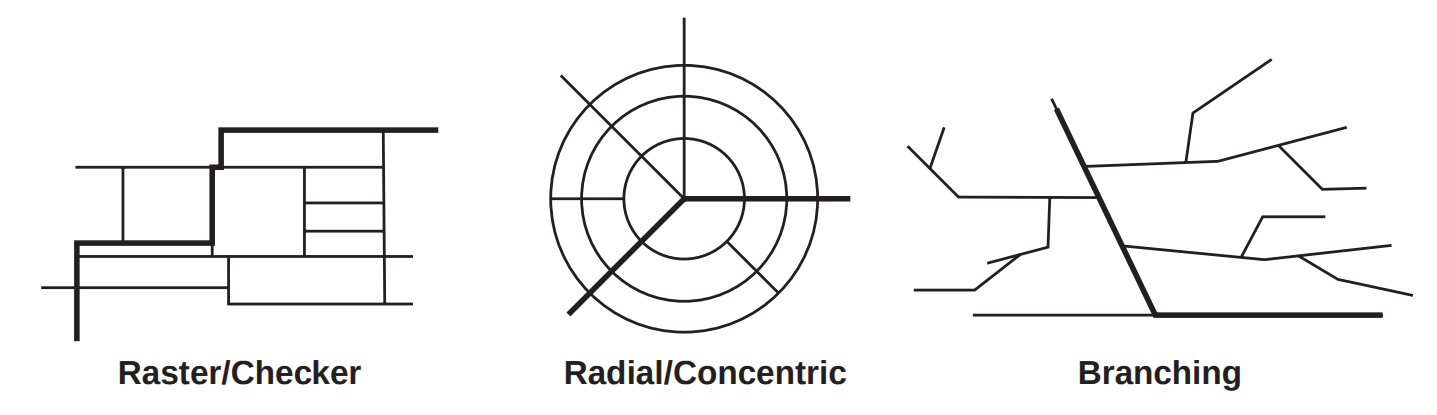
Global Goals (4) — Street patterns
Different patterns found in cities:
Street patterns — Examples
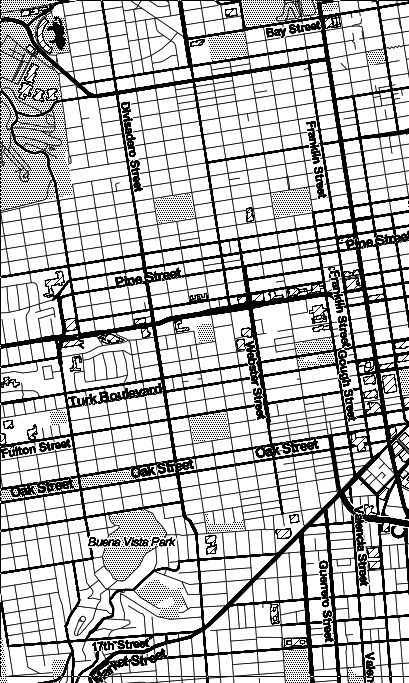
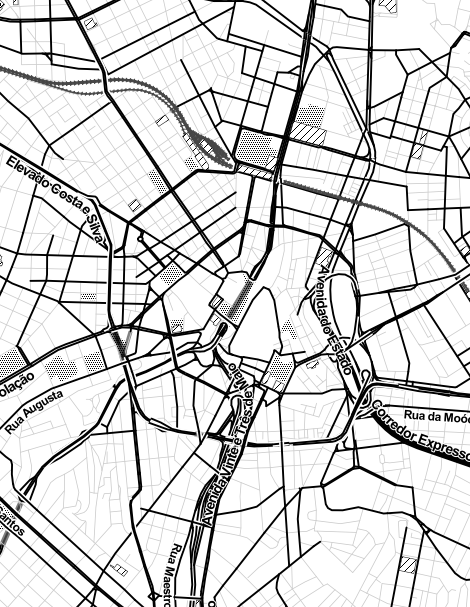


http://maps.stamen.com/
Lot subdivision

Parish and Müller (2001)
- Recursively divide along the longest edges that are approximately parallel
- Discard all blocks that do not have street access
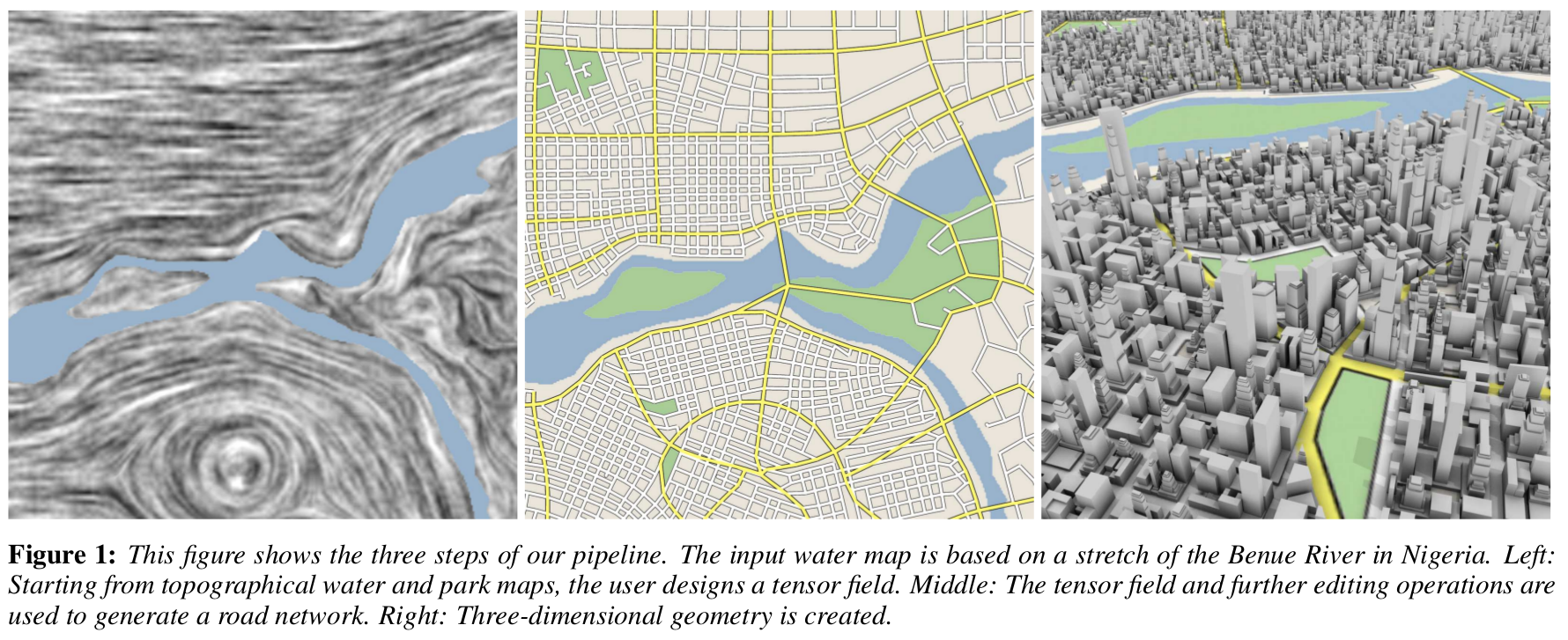
Tensor fields
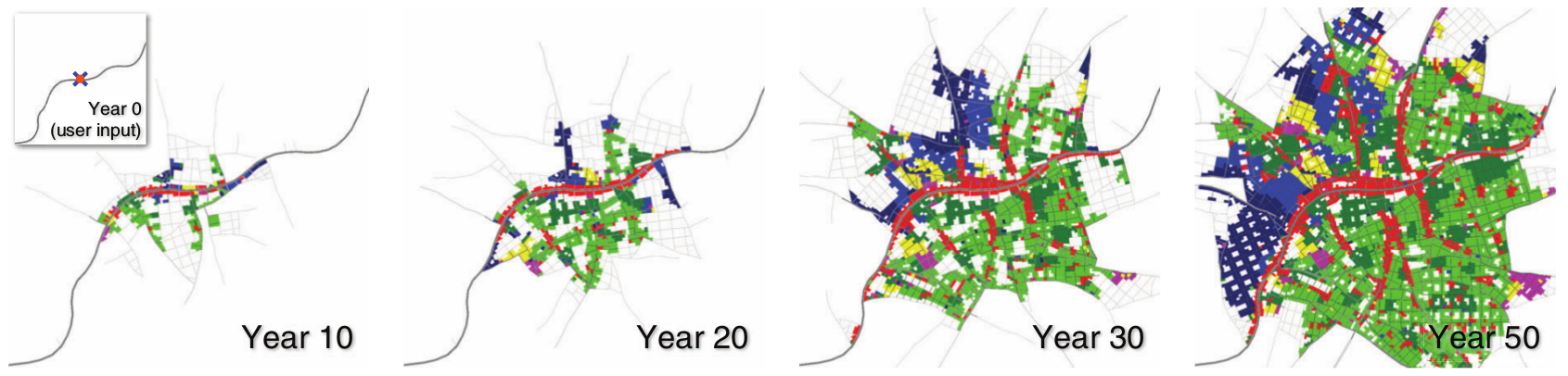
Time simulation